Course catalog
Categories
Showing 10,601-10,620 of 16,115 items.

 راینو: تی اسپلینز
(Mitalearn-82974)
راینو: تی اسپلینز
(Mitalearn-82974)
- 4 hours 6 minutes
- متوسط
- Release date: 22 June 2026
- Author: Jean Gorospe
درباره این دوره:
با T-Splines، پلاگین Rhino برای مدل سازی سطوح انعطاف پذیر آشنا شوید. طراحی شده توسط Autodesk، ساخته شده برای طراحانی مانند شما، T-Splines به شما امکان می دهد تا اشکال ارگانیک بسیار پیچیده را بسیار سریعتر از آنچه که تنها با Rhino امکان پذیر است، مدل کنید. در این دوره مقدماتی، ژان گوروسپ یک نمای کلی از نحوه عملکرد T-Splines ارائه می دهد. Jean ابزارهای ضروری برای کار با مش ها، ایجاد و ویرایش یک مدل از ابتدا، تبدیل مدل ها به NURBS و اصلاح کار شما در Rhino را پوشش می دهد. فصل 4 بر روی یک پروژه نمونه با یک هواپیمای مدل متمرکز است، اما شما به راحتی می توانید همراه با دارایی های خود دنبال کنید.
Related Skills

راینو: طراحی مبلمان
(Mitalearn-75511)
- 2 hours 25 minutes
- متوسط
- Release date: 22 June 2026
- Author: Jonathan Racek
درباره این دوره:
یک رویکرد مبتنی بر فرآیند برای طراحی مبلمان با راینو را بیاموزید، با تمرکز بر ایجاد سطوح پیچیده که از ابزارهای قدرتمند مدلسازی و نمونهسازی Rhino 3D استفاده میکند. این دوره دارای چهار بخش است.
rnrn این آموزشها با نکات و استراتژیهای صرفهجویی در زمان، نه تنها شما را به طراح مبلمان بهتر، بلکه سریعتر نیز تبدیل میکنند.
Related Skills
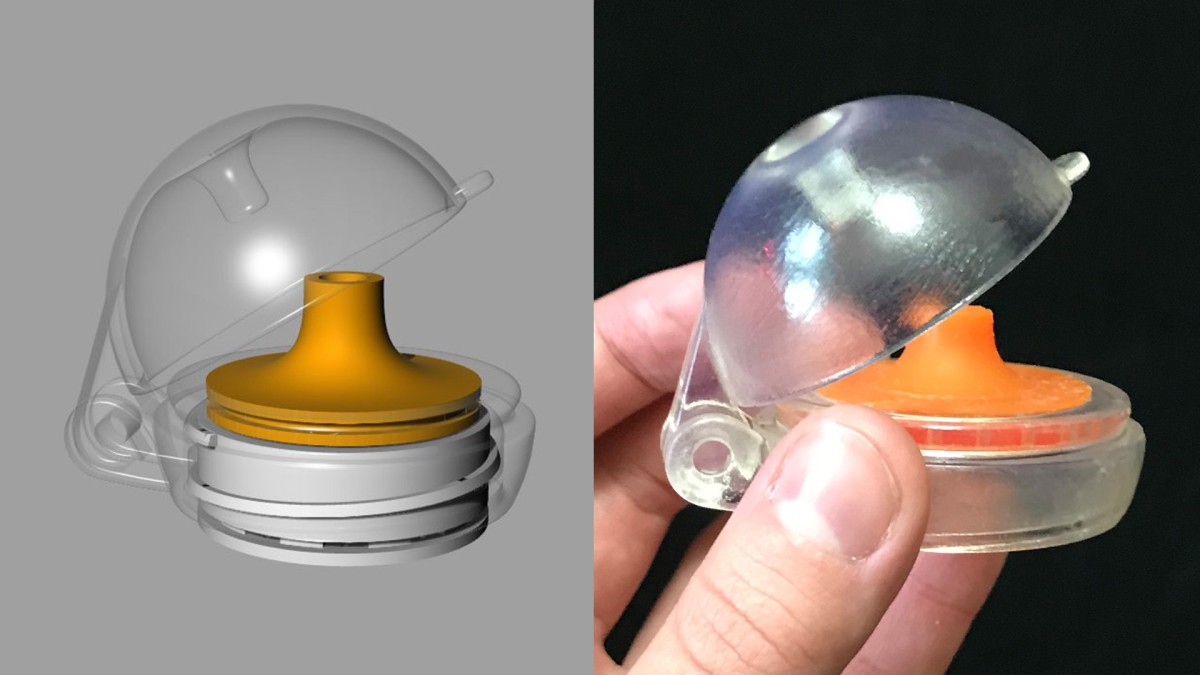
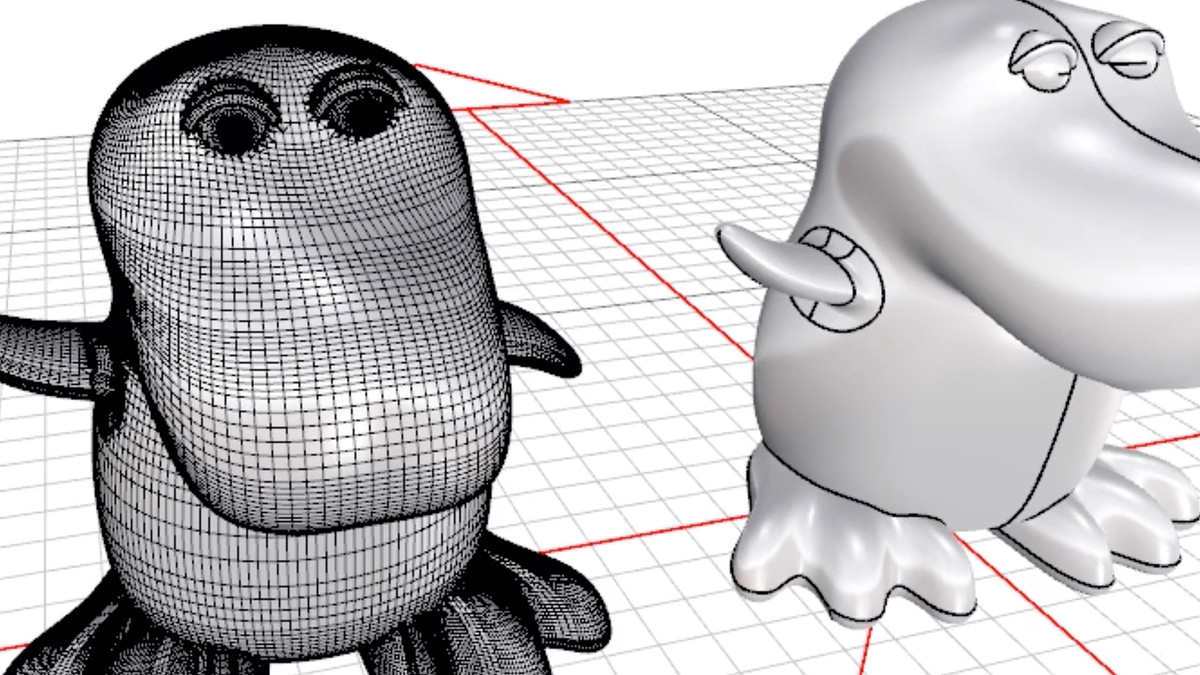
راینو: مدل سازی برای چاپ سه بعدی
(Mitalearn-224091)
- 1 hours 38 minutes
- مناسب همه
- Release date: 22 June 2026
- Author: Olivia Morgan
درباره این دوره:
راینو یک ابزار قدرتمند مدلسازی دیجیتال برای معماران، مهندسان و طراحان محصول است. آزادی مدلسازی سطح راینو میتواند طرحهای پیچیدهای ایجاد کند که همیشه برای ساخت فیزیکی بهترین نیستند. برای تهیه یک مدل برای چاپ سه بعدی، باید هندسه تمیز بسته ایجاد کنید. در این دوره، مربی اولیویا مورگان، تکنیک های مدل سازی خوب را از ابتدا تا انتها، برای پروژه های چاپ سه بعدی و سایر روش های ساخت فیزیکی پوشش می دهد. او همچنین نکاتی را ارائه می دهد که می توانید در صورت بروز مشکل در طول فرآیند مدل سازی از آنها استفاده کنید. این مهارتها شامل عیبیابی بولی، تعمیر سوراخها، و رفع «اشیاء بد» است. در نهایت، اولیویا نحوه صادرات صحیح مدل خود را برای چاپگرهای سه بعدی مختلف، با استفاده از نمونه های دنیای واقعی، پوشش می دهد.
Related Skills

راینو: مدل سازی جواهرات
(Mitalearn-82991)
- 2 hours 42 minutes
- متوسط
- Release date: 22 June 2026
- Author: Jean Gorospe
درباره این دوره:
Rhino نرم افزار پیشرو برای طراحی و تولید جواهرات حرفه ای است که برای ایجاد نمونه های اولیه برای به اشتراک گذاشتن با مشتریان و صنعتگران و تهیه نقشه های نهایی CAD برای پرینت سه بعدی و فرز استفاده می شود. طراح Jean Gorospe هیجان زده است که تکنیک های مدل سازی جواهرات Rhino خود را با شما به اشتراک بگذارد. در این دوره، از راینو 5 برای ایجاد چهار قطعه استفاده میکنید: یک حلقه بیضی شکل، یک حلقه نامزدی پیچیدهتر، یک گوشواره کابوشون و یک کاف مینا. این تکنیکها ساختار هندسه اولیه، جاروها و لفتها، فیلهها و افستها را پوشش میدهند. شما گردش کار برای ایجاد قطعات و سطوح اساسی و پیچیده را یاد خواهید گرفت و در پایان دوره، می توانید دانش را در مفاهیم و طرح های جواهرات خود به کار ببرید.
Related Skills
راینو: مدیریت فایل و نمونه سازی
(Mitalearn-164404)
- 1 hours 24 minutes
- مبتدی
- Release date: 21 June 2026
- Author: Dave Schultze
درباره این دوره:
راینو یک ابزار پیشرفته مدل سازی سه بعدی است که در معماری و طراحی صنعتی استفاده می شود. در این دوره آموزشی، ابزارها و تکنیک های مفیدی برای مدیریت فایل های سه بعدی و ارتقای نمونه اولیه بازی خود خواهید آموخت. مدرس Dave Schultze توضیح میدهد که چگونه میتوان مدلهایی ایجاد کرد که بهراحتی بهراحتی بهدست میآیند، نمونهسازی میشوند و با راینو چاپ میشوند. نحوه ارسال فایلها برای بررسی، صادرات فایلهای Rhino برای استفاده در برنامههای دیگر، و تبدیل فایلها به عقب و جلو از Illustrator را بیاموزید. بهعلاوه، گردش کار نمونهسازی بیخطر Dave را برای ایجاد مدلهایی برای پرینت سه بعدی بیاموزید.
Related Skills

 رباتیک مدرن، درس 2: سینماتیک ربات
(Mitalearn-352934)
رباتیک مدرن، درس 2: سینماتیک ربات
(Mitalearn-352934)
- 1 hours 11 minutes
- متوسط
- Release date: 23 June 2026
- Author: Kevin Lynch
درباره این دوره:
آیا می خواهید بدانید ربات ها چگونه کار می کنند؟ آیا به عنوان یک شغل به رباتیک علاقه دارید؟ آیا مایل به سرمایه گذاری برای یادگیری تکنیک های مدل سازی اساسی ریاضی هستید که در همه زیر شاخه های رباتیک استفاده می شود؟ اگر چنین است، پس تخصص "رباتیک مدرن: مکانیک، برنامه ریزی و کنترل" ممکن است برای شما مناسب باشد. این تخصص، متشکل از شش دوره کوتاه، آمادگی جدی برای دانشجویان جدی است که امیدوارند در زمینه رباتیک کار کنند یا تحصیلات پیشرفته را انجام دهند. نمونه بردار نیست. در درس 2 از تخصص، سینماتیک ربات، شما یاد خواهید گرفت که سینماتیک رو به جلو (محاسبه پیکربندی "دست" ربات بر اساس مقادیر مشترک) با استفاده از فرمول حاصلضرب نمایی را حل کنید. تلاشهای شما در دوره 1 به ثمر مینشیند، زیرا سینماتیک رو به جلو با ابزارهایی که آموختهاید نسیم است. به دنبال آن، کینماتیک سرعت و استاتیک مربوط به سرعتها و نیروها/گشتاورهای مفصلی به پیچها و آچارهای اثر پایانی، سینماتیک معکوس (محاسبه مقادیر اتصال که به پیکربندی «دست» دلخواه میرسند) و سینماتیک رباتها با زنجیرههای بسته دنبال میشود. این دوره از کتاب درسی "روباتیک مدرن: مکانیک، برنامه ریزی و کنترل" (لینچ و پارک، انتشارات دانشگاه کمبریج 2017) پیروی می کند. می توانید کتاب را خریداری کنید یا از نسخه pdf پیش چاپ رایگان استفاده کنید. شما بر روی کتابخانه ای از نرم افزارهای رباتیک به زبان دلخواه خود (در میان پایتون، متماتیکا و متلب) ایجاد خواهید کرد و از شبیه ساز ربات چند پلتفرمی رایگان V-REP استفاده خواهید کرد که به شما امکان می دهد با پیشرفته ترین ها کار کنید. ربات ها در آسایش خانه خود و با سرمایه گذاری مالی صفر.
Related Skills
رباتیک مدرن، دوره 1: مبانی حرکت ربات
(Mitalearn-351217)
- 1 hours 10 minutes
- متوسط
- Release date: 23 June 2026
- Author: Kevin Lynch
درباره این دوره:
آیا می خواهید بدانید ربات ها چگونه کار می کنند؟ آیا به عنوان یک شغل به رباتیک علاقه دارید؟ آیا مایل به سرمایه گذاری برای یادگیری تکنیک های مدل سازی اساسی ریاضی هستید که در همه زیر شاخه های رباتیک استفاده می شود؟ اگر چنین است، پس تخصص "رباتیک مدرن: مکانیک، برنامه ریزی و کنترل" ممکن است برای شما مناسب باشد. این تخصص، متشکل از شش دوره کوتاه، آمادگی جدی برای دانشجویان جدی است که امیدوارند در زمینه رباتیک کار کنند یا تحصیلات پیشرفته را انجام دهند. نمونه بردار نیست. در دوره 1 تخصص، مبانی حرکت ربات، مطالب اساسی در مورد پیکربندی ربات، هم برای مکانیسم های ربات سریال و هم برای ربات های با زنجیره بسته، یاد خواهید گرفت. شما در مورد فضای پیکربندی (فضای C)، درجات آزادی، توپولوژی فضای C، نمایش ضمنی و صریح پیکربندی ها، و محدودیت های هولونومی و غیرهولونومیک خواهید آموخت. همچنین یاد خواهید گرفت که چگونه سرعت ها و نیروها را به صورت پیچ و تاب و آچار نمایش دهید. این ماده هسته اصلی مطالعه هر چیزی است که حرکت می کند (به عنوان مثال، روبات ها). این دوره از کتاب درسی "روباتیک مدرن: مکانیک، برنامه ریزی و کنترل" (لینچ و پارک، انتشارات دانشگاه کمبریج 2017) پیروی می کند. می توانید کتاب را خریداری کنید یا از نسخه pdf پیش چاپ رایگان استفاده کنید. شما بر روی کتابخانه ای از نرم افزارهای رباتیک به زبان دلخواه خود (در میان پایتون، متماتیکا و متلب) ایجاد خواهید کرد و از شبیه ساز ربات چند پلتفرمی رایگان V-REP استفاده خواهید کرد که به شما امکان می دهد با پیشرفته ترین ها کار کنید. ربات ها در آسایش خانه خود و با سرمایه گذاری مالی صفر.
Related Skills

رباتیک مدرن، دوره 3: دینامیک ربات
(Mitalearn-353104)
- 1 hours 18 minutes
- متوسط
- Release date: 23 June 2026
- Author: Kevin Lynch
درباره این دوره:
آیا می خواهید بدانید ربات ها چگونه کار می کنند؟ آیا به عنوان یک شغل به رباتیک علاقه دارید؟ آیا مایل به سرمایه گذاری برای یادگیری تکنیک های مدل سازی اساسی ریاضی هستید که در همه زیر شاخه های رباتیک استفاده می شود؟ اگر چنین است، پس تخصص "رباتیک مدرن: مکانیک، برنامه ریزی و کنترل" ممکن است برای شما مناسب باشد. این تخصص، متشکل از شش دوره کوتاه، آمادگی جدی برای دانشجویان جدی است که امیدوارند در زمینه رباتیک کار کنند یا تحصیلات پیشرفته را انجام دهند. نمونه بردار نیست. در دوره 3 تخصص، دینامیک ربات، الگوریتم های عددی کارآمد برای دینامیک رو به جلو (محاسبه شتاب ربات با توجه به پیکربندی، سرعت و نیروهای مشترک و گشتاور آن) و دینامیک معکوس (محاسبه نیروهای مشترک و گشتاورهای مورد نیاز با توجه به ربات) را خواهید آموخت. پیکربندی، سرعت و شتاب). اولی برای شبیه سازی مفید است و دومی برای کنترل ربات مفید است. شما همچنین یاد خواهید گرفت که چگونه مسیرهای ربات را با توجه به محدودیت های دینامیکی برنامه ریزی کنید. این دوره از کتاب درسی "روباتیک مدرن: مکانیک، برنامه ریزی و کنترل" (لینچ و پارک، انتشارات دانشگاه کمبریج 2017) پیروی می کند. می توانید کتاب را خریداری کنید یا از نسخه pdf پیش چاپ رایگان استفاده کنید. شما بر روی کتابخانه ای از نرم افزارهای رباتیک به زبان دلخواه خود (در میان پایتون، متماتیکا و متلب) ایجاد خواهید کرد و از شبیه ساز ربات چند پلتفرمی رایگان V-REP استفاده خواهید کرد که به شما امکان می دهد با پیشرفته ترین ها کار کنید. ربات ها در آسایش خانه خود و با سرمایه گذاری مالی صفر.
Related Skills

رباتیک مدرن، دوره 4: برنامه ریزی و کنترل حرکت ربات
(Mitalearn-352951)
- 1 hours 47 minutes
- متوسط
- Release date: 23 June 2026
- Author: Kevin Lynch
درباره این دوره:
آیا می خواهید بدانید ربات ها چگونه کار می کنند؟ آیا به عنوان یک شغل به رباتیک علاقه دارید؟ آیا مایل به سرمایه گذاری برای یادگیری تکنیک های مدل سازی اساسی ریاضی هستید که در همه زیر شاخه های رباتیک استفاده می شود؟ اگر چنین است، پس تخصص "رباتیک مدرن: مکانیک، برنامه ریزی و کنترل" ممکن است برای شما مناسب باشد. این تخصص، متشکل از شش دوره کوتاه، آمادگی جدی برای دانشجویان جدی است که امیدوارند در زمینه رباتیک کار کنند یا تحصیلات پیشرفته را انجام دهند. نمونه بردار نیست. در دوره 4 تخصص، برنامه ریزی و کنترل حرکت ربات، مفاهیم کلیدی تولید حرکت ربات را یاد خواهید گرفت: برنامه ریزی حرکت برای ربات در حضور موانع، و کنترل بازخورد در زمان واقعی برای ردیابی حرکت برنامه ریزی شده. فصل 10، برنامهریزی حرکت، کتاب درسی «رباتیک مدرن»، مطالب پایهای مانند موانع فضای C، نمودارها و درختان، و جستجوی نمودار، و همچنین تکنیکهای کلاسیک و مدرن برنامهریزی حرکت، مانند برنامهریزی حرکت مبتنی بر شبکه، نمونهبرداری تصادفی را پوشش میدهد. برنامه ریزان مبتنی بر و زمینه های بالقوه مجازی. فصل 11، کنترل ربات، کنترل حرکت، کنترل نیرو، و کنترل نیروی حرکتی ترکیبی را پوشش می دهد. این دوره از کتاب درسی "روباتیک مدرن: مکانیک، برنامه ریزی و کنترل" (لینچ و پارک، انتشارات دانشگاه کمبریج 2017) پیروی می کند. می توانید کتاب را خریداری کنید یا از نسخه pdf پیش چاپ رایگان استفاده کنید. شما بر روی کتابخانه ای از نرم افزارهای رباتیک به زبان دلخواه خود (در میان پایتون، متماتیکا و متلب) ایجاد خواهید کرد و از شبیه ساز ربات چند پلتفرمی رایگان V-REP استفاده خواهید کرد که به شما امکان می دهد با پیشرفته ترین ها کار کنید. ربات ها در آسایش خانه خود و با سرمایه گذاری مالی صفر.
Related Skills

رباتیک مدرن، دوره 5: دستکاری ربات و ربات های متحرک چرخ دار
(Mitalearn-353172)
- 1 hours 57 minutes
- متوسط
- Release date: 23 June 2026
- Author: Kevin Lynch
درباره این دوره:
آیا می خواهید بدانید ربات ها چگونه کار می کنند؟ آیا به عنوان یک شغل به رباتیک علاقه دارید؟ آیا مایل به سرمایه گذاری برای یادگیری تکنیک های مدل سازی اساسی ریاضی هستید که در همه زیر شاخه های رباتیک استفاده می شود؟ اگر چنین است، پس تخصص "رباتیک مدرن: مکانیک، برنامه ریزی و کنترل" ممکن است برای شما مناسب باشد. این تخصص، متشکل از شش دوره کوتاه، آمادگی جدی برای دانشجویان جدی است که امیدوارند در زمینه رباتیک کار کنند یا تحصیلات پیشرفته را انجام دهند. نمونه بردار نیست. در دوره 5 از تخصص، برنامه ریزی حرکت ربات و ربات های متحرک چرخ دار، ما به مباحث پیشرفته در رباتیک می پردازیم. فصل 12، چنگ زدن و دستکاری، کتاب درسی «رباتیک مدرن»، مدلسازی سینماتیک و نیروها بین اجسام صلب در تماس را پوشش میدهد و مدلسازی را برای تجزیه و تحلیل و برنامهریزی گرفتن ربات و سایر کارهای دستکاری به کار میبرد. فصل 13، رباتهای متحرک چرخدار، مدلسازی، برنامهریزی حرکت، و کنترل بازخورد رباتهای متحرک چرخدار همه جهته و غیرهولونومیک را پوشش میدهد و با پرداختن به کنترل دستکاریکنندههای متحرک متشکل از یک پایه متحرک چرخدار و یک بازوی ربات به پایان میرسد. این دوره از کتاب درسی "روباتیک مدرن: مکانیک، برنامه ریزی و کنترل" (لینچ و پارک، انتشارات دانشگاه کمبریج 2017) پیروی می کند. می توانید کتاب را خریداری کنید یا از نسخه pdf پیش چاپ رایگان استفاده کنید. شما بر روی کتابخانه ای از نرم افزارهای رباتیک به زبان دلخواه خود (در میان پایتون، متماتیکا و متلب) ایجاد خواهید کرد و از شبیه ساز ربات چند پلتفرمی رایگان V-REP استفاده خواهید کرد که به شما امکان می دهد با پیشرفته ترین ها کار کنید. ربات ها در آسایش خانه خود و با سرمایه گذاری مالی صفر.
Related Skills
رباتیک: ادراک
(Mitalearn-353223)
- 9 hours 55 minutes
- متوسط
- Release date: 23 June 2026
- Author: Kostas Daniilidis,Jianbo Shi
درباره این دوره:
چگونه ربات ها می توانند جهان و حرکات خود را درک کنند تا بتوانند وظایف ناوبری و دستکاری را انجام دهند؟ در این ماژول، ما مطالعه خواهیم کرد که چگونه تصاویر و ویدیوهای به دست آمده توسط دوربین های نصب شده روی روبات ها به نمایش هایی مانند ویژگی ها و جریان نوری تبدیل می شوند. چنین نمایشهای دوبعدی به ما اجازه میدهند تا اطلاعات سهبعدی درباره مکان دوربین و حرکت ربات در کدام جهت استخراج کنیم. متوجه خواهید شد که چگونه گرفتن اشیاء با محاسبه ژست سه بعدی اشیا تسهیل می شود و ناوبری را می توان با کیلومتر سنجی بصری و مکان یابی مبتنی بر نقطه عطف انجام داد.
Related Skills
رباتیک: برنامه ریزی حرکت محاسباتی
(Mitalearn-355399)
- 1 hours 21 minutes
- مناسب همه
- Release date: 23 June 2026
- Author: CJ Taylor
درباره این دوره:
سیستمهای رباتیک معمولاً شامل سه جزء هستند: مکانیزمی که قادر به اعمال نیرو و گشتاور بر محیط است، سیستم ادراک برای تشخیص جهان و سیستم تصمیمگیری و کنترل که رفتار ربات را برای دستیابی به اهداف مورد نظر تعدیل میکند. در این دوره ما این مشکل را در نظر خواهیم گرفت که چگونه یک ربات تصمیم می گیرد برای رسیدن به اهداف خود چه کاری انجام دهد. این مشکل اغلب به عنوان برنامه ریزی حرکتی شناخته می شود و به روش های مختلفی برای مدل سازی موقعیت های مختلف فرموله شده است. شما برخی از رایج ترین رویکردها برای پرداختن به این مشکل از جمله روش های مبتنی بر نمودار، برنامه ریزان تصادفی و میدان های پتانسیل مصنوعی را خواهید آموخت. در طول دوره، جنبه هایی از مشکل را که برنامه ریزی را به چالش می کشد، مورد بحث قرار خواهیم داد.
Related Skills
رباتیک: تحرک
(Mitalearn-355518)
- 4 hours 56 minutes
- مناسب همه
- Release date: 23 June 2026
- Author: Daniel E. Koditschek
درباره این دوره:
چگونه ربات ها می توانند از موتورها و حسگرهای خود برای حرکت در یک محیط بدون ساختار استفاده کنند؟ شما خواهید فهمید که چگونه بدن ربات ها و رفتارهایی را طراحی کنید که اندام ها و ضمائم عمومی تر را برای اعمال نیروهای فیزیکی که تحرک قابل اعتماد را در دنیای پیچیده و پویا به کار می گیرند، به کار می گیرند. ما رویکردی را برای ترکیب انتزاعات دینامیکی ساده ایجاد می کنیم که تا حدی تولید برنامه های حسی- حرکتی پیچیده را خودکار می کند. موضوعات خاصی که پوشش داده خواهد شد عبارتند از: تحرک در حیوانات و روبات ها، سینماتیک و دینامیک ماشین های پا، و طراحی رفتار دینامیکی از طریق مناظر انرژی.
Related Skills
رباتیک: تخمین و یادگیری
(Mitalearn-355484)
- 2 hours 10 minutes
- مناسب همه
- Release date: 23 June 2026
- Author: Daniel Lee
درباره این دوره:
چگونه روباتها میتوانند وضعیت و ویژگیهای محیط اطراف خود را از اندازهگیریهای سنسور نویز به موقع تعیین کنند؟ در این ماژول شما یاد خواهید گرفت که چگونه ربات ها را وادار کنید تا عدم قطعیت را در تخمین و یادگیری از یک دنیای پویا و در حال تغییر بگنجانند. موضوعات خاصی که پوشش داده خواهد شد شامل مدلهای مولد احتمالی، فیلتر بیزی برای محلیسازی و نقشهبرداری است.
Related Skills
رباتیک: رباتیک هوایی
(Mitalearn-355348)
- 5 hours 23 minutes
- مناسب همه
- Release date: 23 June 2026
- Author: Vijay Kumar
درباره این دوره:
چگونه می توانیم وسایل نقلیه هوایی چابکی بسازیم که بتوانند به طور مستقل در محیط های به هم ریخته داخلی و خارجی کار کنند؟ شما با مکانیک پرواز و طراحی ربات های پرنده کوادروتور آشنا خواهید شد و قادر خواهید بود مدل های پویا، کنترل کننده ها را استخراج کنید و برنامه ریزان را برای عملیات در محیط های سه بعدی ترکیب کنید. شما در معرض چالش های استفاده از حسگرهای پر سر و صدا برای محلی سازی و مانور در محیط های پیچیده و سه بعدی خواهید بود. در نهایت، با دیدن نمونههایی در دنیای واقعی از کاربردها و چالشهای احتمالی صنعت هواپیماهای بدون سرنشین که به سرعت در حال رشد هستند، بینشهایی به دست خواهید آورد. پیش نیازهای ریاضی: انتظار می رود دانشجویانی که این درس را می گذرانند با جبر خطی، حساب تک متغیری و معادلات دیفرانسیل آشنایی داشته باشند. پیش نیازهای برنامه نویسی: مقداری تجربه برنامه نویسی با متلب یا اکتاو توصیه می شود (ما در این دوره از MATLAB استفاده خواهیم کرد.) متلب نیاز به استفاده از یک کامپیوتر 64 بیتی دارد.
Related Skills
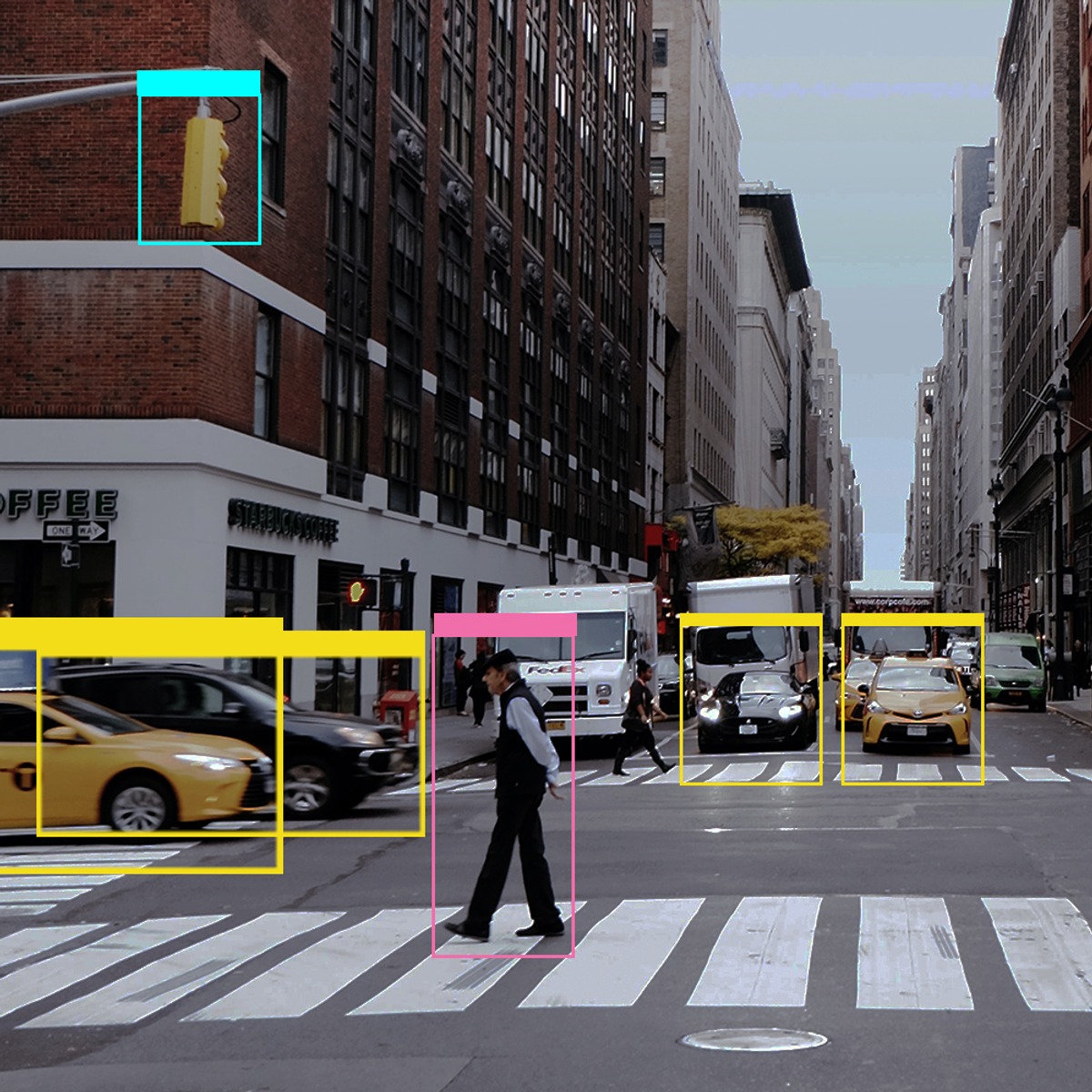
ردیابی اشیا و تشخیص حرکت با دید کامپیوتری
(Mitalearn-353138)
- 1 hours 6 minutes
- مبتدی
- Release date: 23 June 2026
- Author: Amanda Wang,Matt Rich,Brandon Armstrong
درباره این دوره:
در سومین و آخرین دوره تخصصی Computer Vision for Engineering and Science ردیابی اجسام و تشخیص حرکت در فیلم ها را خواهید آموخت. ردیابی اجسام و تشخیص حرکت کارهای دشواری هستند، اما برای کاربردهای متنوعی مانند میکروبیولوژی و سیستمهای مستقل مورد نیاز هستند. برای ردیابی اشیا، ابتدا باید آنها را شناسایی کنید. شما از شبکه های عصبی عمیق از قبل آموزش دیده برای انجام تشخیص اشیا استفاده خواهید کرد. همچنین از جریان نوری برای تشخیص حرکت و استفاده از نتایج برای تشخیص اجسام متحرک استفاده خواهید کرد. در پایان این دوره، تمام مهارت های آموخته شده در این تخصص را در یک پروژه نهایی به کار خواهید برد. شما نقش یک مهندس را خواهید داشت که از او خواسته می شود اتومبیل ها را در یک بزرگراه شلوغ ردیابی کند و این چالش اضافه شده برای شمارش هر وسیله نقلیه و جهت آن است. شما در طول این دوره از MATLAB استفاده خواهید کرد. متلب برای میلیون ها نفر از افرادی که در رشته های مهندسی و علوم کار می کنند انتخابی است و قابلیت هایی را که برای انجام وظایف بینایی کامپیوتر شما نیاز دارید را فراهم می کند. در طول دوره برای تکمیل کار، دسترسی رایگان به متلب در اختیار شما قرار خواهد گرفت. برای موفقیت در این تخصص، داشتن تجربه قبلی در پردازش تصویر کمک خواهد کرد. اگر با داده های تصویری تازه کار هستید، توصیه می شود ابتدا تخصص پردازش تصویر برای مهندسی و علوم را تکمیل کنید.
Related Skills

ردیابی در افتر افکت
(Mitalearn-167719)
- 3 hours 5 minutes
- متوسط
- Release date: 21 June 2026
- Author: Eran Stern
درباره این دوره:
ردیابی یک هنر و یک علم است. این شامل مکان یابی یک نقطه یا شی در فیلم شما هنگام حرکت از فریم به فریم است. داده های به دست آمده را می توان برای تثبیت فیلم یا حل حرکت دوربین استفاده کرد. افتر افکت ابزارهای ردیابی قدرتمند بسیاری را ارائه می دهد که به شما امکان می دهد بر جنبه های خلاقانه کار خود تمرکز کنید تا جنبه های فنی. این دوره مبتنی بر پروژه تمام روشهای مختلف ردیابی داخل After Effects را بررسی میکند: ردیابی یک و دو نقطهای، ردیابی ماسک، ردیابی دوربین، ردیابی چهره، و ردیابی برنامهریز در Mocha AE. مربی Eran Stern توضیح میدهد که هر ابزار برای کدام سناریو مناسبتر است، و به شما کمک میکند از دادههای ردیابی خود برای اهداف خاص - جلوهها، روتوسکوپی، ترکیببندی و موارد دیگر- استفاده کنید و نتایج را ارائه دهید.
Related Skills

ردیابی سه بعدی و ترکیب افترافکت
(Mitalearn-113098)
- 1 hours 18 minutes
- پیشرفته
- Release date: 21 June 2026
- Author: Brian Morse
درباره این دوره:
چه با یک تیم کار کنید و چه به تنهایی، درک نحوه استفاده کارآمد از اطلاعات ردیابی سه بعدی در ترکیب بندی می تواند به شما در سرعت بخشیدن به گردش کار کمک کند. در این دوره آموزشی، نحوه استفاده از داده های ردیابی سه بعدی را برای افزودن اشیاء سه بعدی به یک عکس دو بعدی در Adobe After Effects یاد بگیرید. برایان مورس نحوه صادرات دوربین های خود را به Maya و After Effects از SynthEyes نشان می دهد و توضیح می دهد که چگونه یک بار صحنه سه بعدی خود را تنظیم کنید و از آن برای همه عکس های خود استفاده کنید. او همچنین نشان می دهد که چگونه پروژه نهایی خود را ارائه دهید تا همه کامپوزیت ها روان کار کنند.
Related Skills

ردیابی سه بعدی و کامپوزیت هسته ای
(Mitalearn-113081)
- 1 hours 19 minutes
- پیشرفته
- Release date: 21 June 2026
- Author: Brian Morse
درباره این دوره:
چه با یک تیم کار کنید و چه به تنهایی، درک نحوه استفاده کارآمد از اطلاعات ردیابی سه بعدی در ترکیب بندی می تواند به شما در سرعت بخشیدن به گردش کار کمک کند. در این دوره آموزشی، یاد بگیرید که چگونه از داده های ردیابی سه بعدی برای اضافه کردن اشیاء سه بعدی به یک عکس دو بعدی در Nuke استفاده کنید. برایان مورس نحوه صادرات دوربین های خود را به Maya و Nuke از SynthEyes نشان می دهد و توضیح می دهد که چگونه یک بار صحنه سه بعدی خود را تنظیم کنید و از آن برای همه عکس های خود استفاده کنید. او همچنین نشان می دهد که چگونه پروژه نهایی خود را ارائه دهید تا همه کامپوزیت ها روان کار کنند.